ロボットの進むべき道
(名古屋大学大学院工学研究科教授)
最終回の本稿では、産業用ロボットとホームロボットのあり方、進むべき道について述べてみたい。
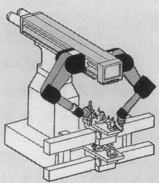
日本における産業用ロボット発達過程をみると、常に世界をリードし、高度化・精密化してきた。導入当初は、占有面積が大きく、人を寄せつけない危険な存在であったが、小型軽量化・高速化が進み、人間と隣り合わせでロボットが稼動する生産現場もよく見かけるようになった。また、塗装、溶接などの単純作業から、高度な組付け作業を可能にする多腕ロボットも開発された。図2は、1990年代にトヨタ自動車がエンジン部品組付け作業に導入した2本腕ロボットである。
また、人間の目に相当する視覚機能を持つロボットや、作業に応じて作業場所を変える移動ロボットも多くの工場で稼動している。さらに、複数の移動ロボットが自律協調して組立て作業を行なう例も出てきている。
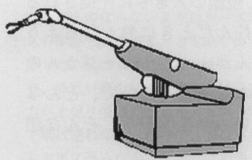
2年前に㈱デンソーが開発した群ロボットシステムは、多彩な作業を行なう6軸ロボットアームと高速で動き回る走行台車を一体化した移動ロボットから構成され、生産量変動に応じて、導入するロボット台数を増減させ、ロボット同士が作業で得た情報を互いに交換し、効率的に環境変化に対応する新しいフレキシブルな生産システムを実現するものである。(図3)また、極小の電子部品を基盤の上に高速かっ正確に装着する電子部品装着装置も産業用ロボットであり、これまで世界をリードしてきた。
欧米諸国では、ロボットに関する研究が日本ほど自由ではない。軍事、航空宇宙、医療関連に限定して研究されてきた経緯がある。外国の大学の研究者から、「日本の大学ではさまざまなロボット研究ができて、うらやましい」とよく言われる。これも、日本人がロボットに対して好意的なイメージを持っているという国民性の違いに起因し、その源流は江戸からくり文化に由来している。
さて、これまでの産業用ロボットの発展過程の問題点と将来のあるべき姿について、私見を述べておきたい。
問題点として、まず第1に、これまでの産業用ロボットの大部分は、大量生産ラインに導入されたものであり、特定の作業だけをする専用機に限られたこと、第2に、産業用ロボットの開発と導入が大企業に集中していること、第3に、完成品の目視検査や小物精密組立てなどの汎用ロボットの開発が遅れていることなどが挙げられる。
日本のモノづくり産業を取り巻く環境は、非常にきびしい状況にある。近隣アジア諸国との人件費格差による産業空洞化、国全体としての技能の流出、若年層の理工化離れなどである。
日本の産業用ロボットの進むべき方向として、第1に、モノづくり産業に共通する作業で、今なお人手に頼っている作業(上で挙げた製品目視検査や小物精密組立てなど)を、人間に代わって行なうロボットの開発が望まれる。そして、人間は、ロボットの運用を管理し、点検・調整する作業を行なうのである。第2に、専用機ではなく、1台で複数の作業をこなす多能工ロボットの開発、第3に、人間が操縦しやすく安全に作動する人間主体設計ロボットの徹底などである。
国の大型プロジェクトなどで、中小企業を含めて多くのモノづくり産業に導入可能な上記産業用ロボットの開発が急がれる。そして、多くのモノづくり現場でロボットを操縦・管理する人を育て、その人々の発想から新しいロボットが誕生していく循環システムを構築しなければならないと思う。

「茶運び人形」がホームロボットのルーツであり、手本であることは前にも述べた。茶運び人形は、主人が客にお茶を運ぶのが面倒だから使うのではないことは明らかである。自然な接客動作の中で、茶運び人形によって座が興じ、見るものを楽しませるエンターテイメントこそが役割なのだ。
私は、ホームロボットの主目的は、当面エンターテイメントに限定されるべきと考えている。介護、医療を行なうロボットが家庭に入ってきても、現状では、それらをホームロボットとは区別したい。もし、導入する際には、いざという時に対応できるオペレータ(人間)とともに導入すべきと思うのである。


私も1日かけて見学したが、歩行ロボットの新旧の対比が絶妙で、子供から大人まで観客全員が、伝統のからす天狗と最新のASIMOの両方の演技に大きな拍手を送っていたのが印象的だった。
江戸からくりと最先端技術を結び付けるものは多くある。たとえば、山車からくりで人形がお社などに変身する折り畳み技術が、折り畳み傘の発明や人工衛星の太陽電池パネルやパノラマアンテナの折り畳み技術に受け継がれているし、伸縮自在に動くろくろ首の仕組みが、狭い所を自由に伸びる象の鼻ロボットや大腸内視鏡の運動制御技術に活かされている。
ロボット好きの日本人だからこそ、人間社会とロボットとの関係を正しく認識しつつ、さまざまな分野に活躍するロボットを生み出していかなければならないと思う。からくり好き、ロボット好きの日本人は、行政改革断行、産業構造変革というかつてない日本の厳しい環境下から、新たなモノづくり産業の発展を築き上げると信じる。(終)